 |
|
|
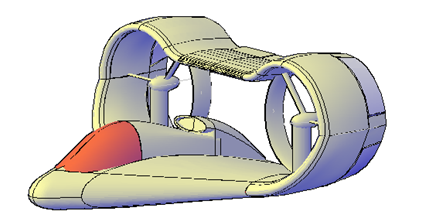
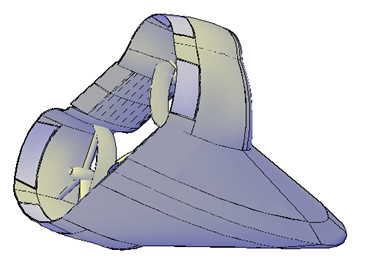
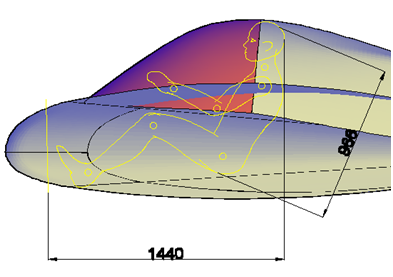
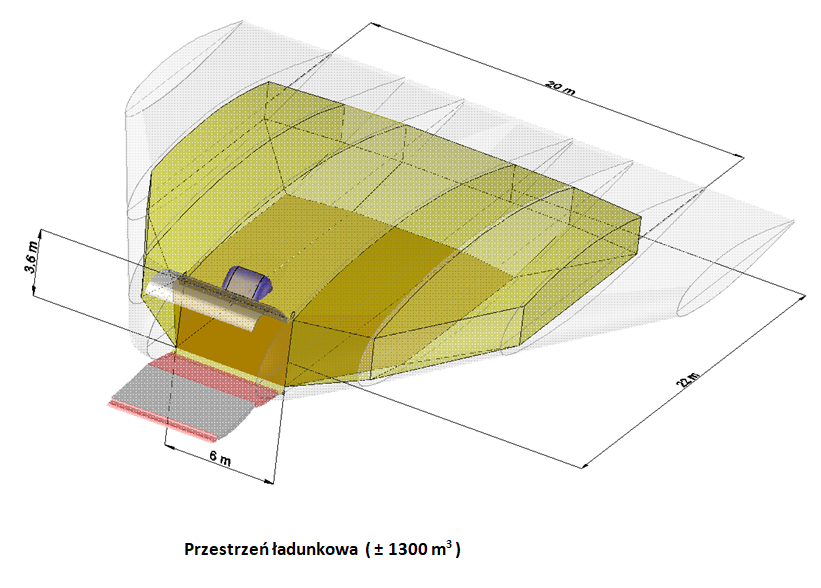
Prezentowany
układ samolotu łączy cechy spłaszczonego pierścieniopłata ze skrzydłem
„delta”.
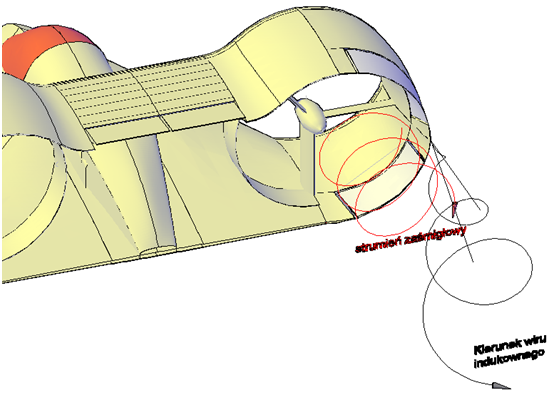
Spłaszczony pierścieniopłat wraz
z zabudowanymi śmigłami daje możliwość redukcji oporu indukowanego. Płat typu „delta” to możliwość integracji układu. Specyfiką układu jest to, że wszystkie elementy płatowca, każdy fragment jego powierzchni, uczestniczą w tworzeniu siły nośnej. Integralność układu , oraz duża objętość przestrzeni dolnego płata pozwalają na korzystne umieszczenie załogi, silnika i całości wyposażenia. W zaprezentowanym przykładzie, zwymiarowano układ pozwalający na stworzenie jednoosobowego „mikro-samolotu” eksperymentalnego. Cel jego realizacji to praktyczne zbadanie skrajnie nietypowego układu aerodynamicznego. W dalszej części opisu zaprezentowano niekonwencjonalny układ sterowania, który maksymalnie wykorzystuje specyfikę układu. |
|
 |
 |
 |
 |
 |
 |
 |
 |
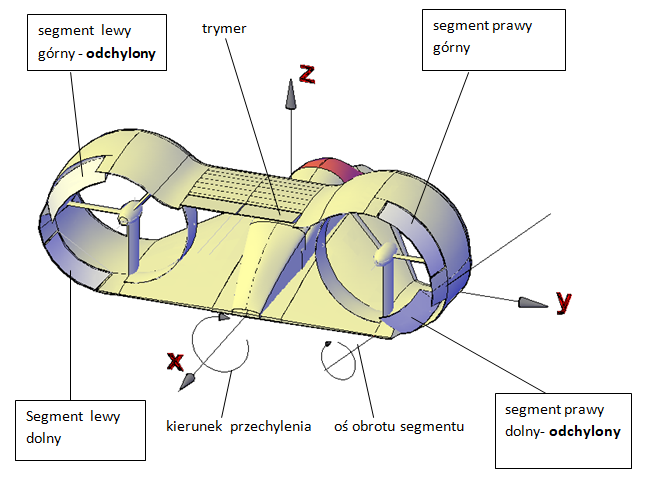
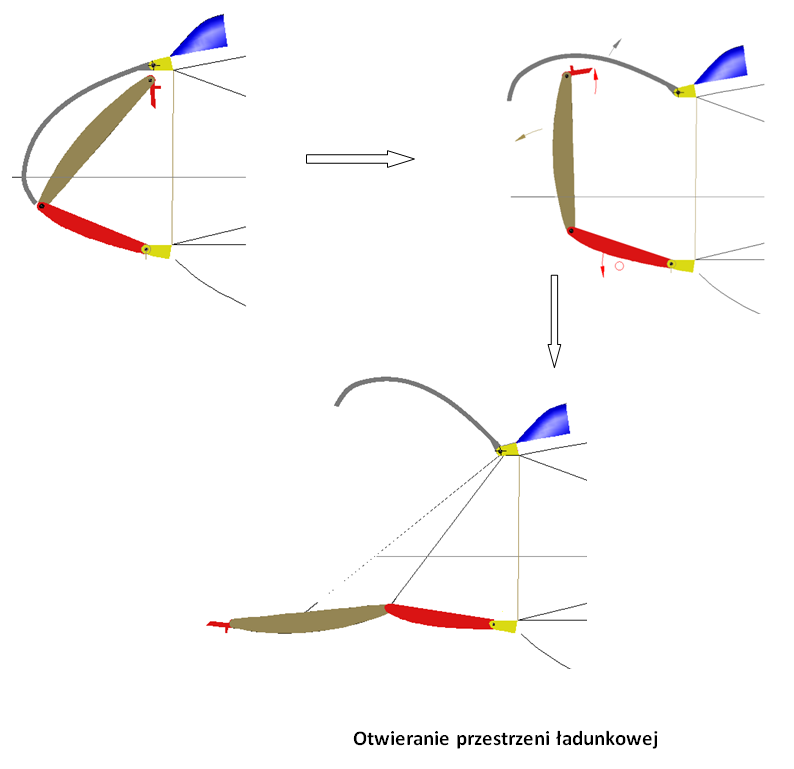
Układ sterowania |
|
 |
|
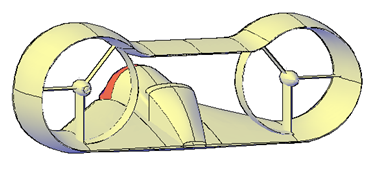
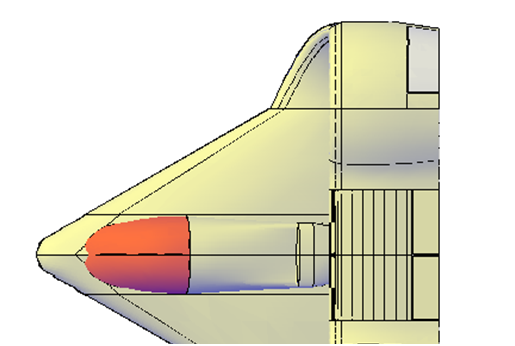
| Układ
sterowania tworzą
cztery ruchome
segmenty rozmieszczone na
łukowych
fragmentach łączących dolny i górny płat, oraz „trymer” stanowiący fragment tylnej części prostego odcinka płata górnego. Wychylenie „trymera” zapewnia równowagę samolotu w ustalonych warunkach lotu. Skorelowane odchylenie poszczególnych ruchomych segmentów zapewnia sterowanie wokół wszystkich osi przestrzennych. Usytuowanie tych segmentów w sąsiedztwie strumieni zaśmigłowych zwiększa dynamikę manewrów. W zademonstrowanym przykładzie odchylenie segmentów „prawego dolnego” i „lewego górnego” spowoduje przechylenie samolotu na lewo. |
|
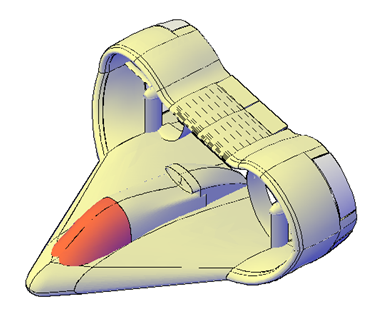
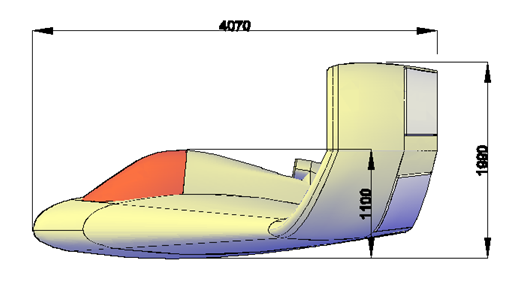
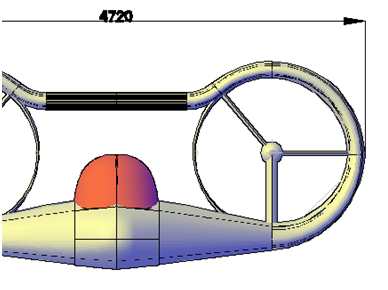
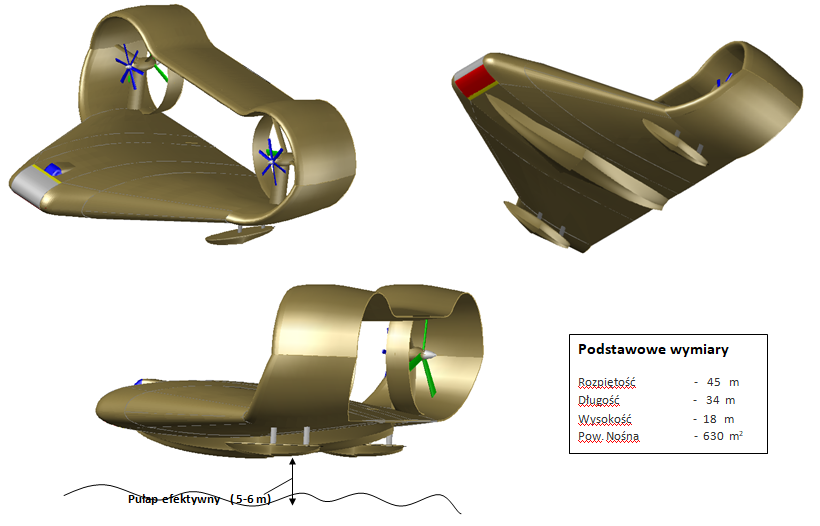
Ekranoplan „DELTA” w formie spłaszczonego pierścieniopłata Widok ogólny – wymiary bazowe |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
Co istotne
|
|

